I decided to make a rolling robot for my first Arduino project. This little guy uses a hamster ball, a micro gearmotor, an Arduino with an Adafruit motor shield, a light sensor, and batteries as a counterweight.
The Wibbly Wobbly Bot rolls randomly around the room, searching for sunbeams. When it rolls into a bright spot, it stops for a nap. When the sunbeam moves away, it begins rolling around, searching for the sunbeam again. There's no remote control--it's totally autonomous.
You can see it in action in the video below. Unfortunately, there wasn't any sun coming into the the studio for this test run so you can't see it stoping for a nap, or waking up when the sunbeam has moved.
Below: Schematic for the first prototype

Unfortunately, the drive shaft snapped before I had a chance to use it in a sunny room, but that's OK...it was the first prototype. A new gearing mechanism is in the works, and a better motor is on its way!
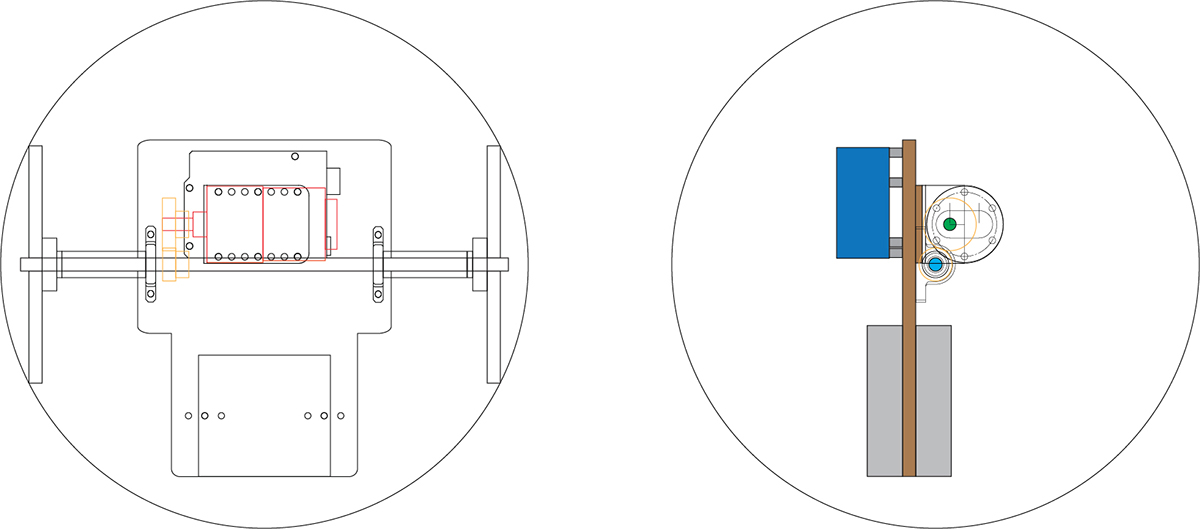
The schematic below is for the second prototype. This version has an axle that runs the length of the sphere. The motor, batteries, and microcontroller spin around the axle using a pair of gears. I will upload photos and another video once I get all the parts in and can start assembling.